光鑷拉曼光譜技術
產品簡介
光鑷拉曼光(guāng)譜技術(laser tweezers Raman spectroscopy LTRS)結合光鑷與顯微拉曼光譜技術,可對單個微納顆粒或單細胞進行(háng)操控與(yǔ)生化分析。常規顯(xiǎn)微拉(lā)曼光譜技術可以獲得微米尺度(dù)分子結構信(xìn)息,但是對於懸(xuán)浮氣/液體中微小粒子(zǐ)或細胞樣品檢測時,由於布朗(lǎng)運動或溶液懸浮等因(yīn)素,很難對樣品進行*準定位與測量(liàng)。光鑷技術可以(yǐ)穩定束縛與操縱微納(nà)顆粒(lì)及生物(wù)分子,有效解決懸浮微顆粒的*準(zhǔn)檢測。
光(guāng)鑷(niè)技術對微粒的操控是非接觸(chù)的遙控方式,不(bú)會給對象造成機械損傷,可穿過(guò)氣/溶液表層界(jiè)麵檢(jiǎn)測內部顆粒物信息(xī),同時,光鑷捕(bǔ)獲的微粒尺度為幾(jǐ)十納米到幾十微(wēi)米,是生物細胞、細胞器、生物(wù)大分子以及氣溶膠等物質尺度範圍。拉曼光譜亦是一種無損傷的分子光譜技術,具有譜峰(fēng)信息豐富,特異性強等優勢,因(yīn)此,光鑷拉曼適用於微納米尺度的單分子研(yán)究領域應用。
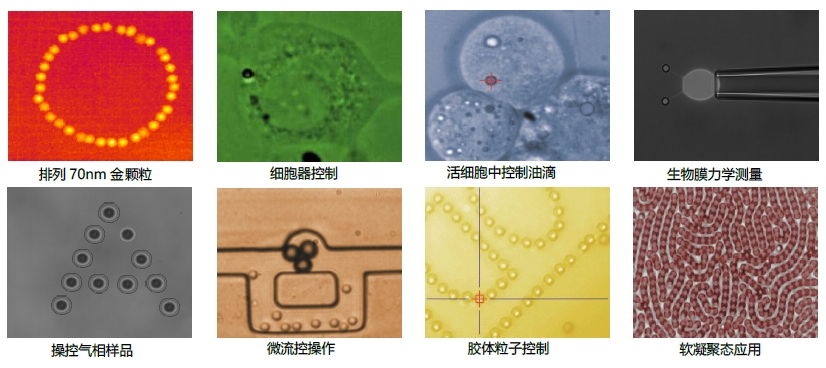
典型應用
1、單細胞成分分析,鑒定(dìng),以及細胞分選(xuǎn)、膜(mó)層原(yuán)位力學分析
2、氣(qì)溶膠單顆粒粒徑大小、形貌特征(zhēng)混合物狀態以及顆粒物表麵信息表(biǎo)征
3、生物軟物質研究,蛋白質折疊與動態性質,NA與蛋白相互(hù)作用、分子馬達等研究。
4、納米材(cái)料:碳納米(mǐ)管,金屬顆粒等
係統介紹(shào)
RTS-LTRS 光鑷拉曼光(guāng)譜係統是北京www.91光儀器有限公司全新推(tuī)出(chū)的光鑷-拉曼聯用(yòng)係統,該係統結合先進的(de)光鑷微控技(jì)術與拉曼分子識別分析技(jì)術,高(gāo)度集(jí)成、性能穩定、易(yì)於操作,能夠實現同(tóng)時(shí)控製大量(liàng)(200 個)目標和高精度(dù)的微納米級顆粒物的分析測量。
1.儀器原理和實現方式
光鑷技術捕獲單個顆粒的基本原理如圖1所示。激光通過倒置顯(xiǎn)微鏡形(xíng)成匯聚光線,高度聚焦的激光會在焦點中心(xīn)形成一個勢能梯度中心,稱之為(wéi)勢阱或光阱。透明的球形微粒會被光阱(jǐng)在三維空間中捕獲,從而進行操控、排(pái)列與微小力的測量。更複雜(zá)一點的情況是光折射(shè)的梯(tī)度力與光散射力以及(jí)粒(lì)子本身的重力與浮(fú)力共同平衡,並在限製粒子的布朗運動後實現3D捕獲操控。
光(guāng)鑷原理:采用100kHz AOD(聲光偏轉器)高速分時掃描不同位置,從而形成多(duō)個(gè)光阱;
區別於傳統的光鑷技術,這種技術可以實現:
1. 控製目標更多:可以產生200個以上的光阱,同時捕獲200個以(yǐ)上的目標微粒;
2. 控製激光強度:0~100%,可獨立控製每個光阱
3. 控製(zhì)光阱移動:軌跡、步長、速度等
4. 降低光阱的漂移:光阱間漂移僅0.05nm/min
5. 提高測力精度:更加精確定位光阱坐標(biāo)
6. 降低係統噪音:無機械振動,提高整體穩定性(xìng)
2.係統介紹
RTS-LTRS光鑷拉曼光譜(pǔ)係統有兩種結構(如下圖所示)
結構一:在www.91光自主研製(zhì)的(de)標準RTS顯微共(gòng)聚焦拉曼光譜儀的基礎上配置(zhì)具有(yǒu)雙層無限遠光路的倒置顯微鏡,上層光路多光阱光鑷係統(tǒng),下層光路為拉曼光路出入口,可內置不同波長激光器(qì),也可外部耦合激光器,拉曼信號通過(guò)光纖或者空間光(guāng)路耦合到光譜儀,光(guāng)路如下(xià):
結構二(èr):在www.91(hàn)光自主研製(zhì)的標準(zhǔn)RTS顯微(wēi)共聚焦拉曼光譜儀的基礎上配置(zhì)具有雙層無限遠光路的倒置顯微鏡,上層光路多(duō)光(guāng)阱光鑷係統,拉曼激光從顯微鏡的側口進入,拉曼信號原路(lù)返回接光譜儀,可(kě)內置不同波長激光器,也(yě)可外部耦(ǒu)合激光器,拉曼信號通過(guò)光纖或者空間(jiān)光路耦合到光譜儀,光路如下:
性能優勢:
標(biāo)配320mm焦長影像校正高通(tōng)光量光譜(pǔ)儀(yí),高像素深製冷光譜CCD相機,可擴展EMCCD,ICCD,InGaAs陣列(liè)等探測器,擴展係統(tǒng)功能
集成化設計,無外置裸露光學元器件 ;
可以實現不同尺(chǐ)寸的多目標懸(xuán)浮和自由移動,從納米尺(chǐ)度至百微米尺度
多(duō)目標捕獲,水中200個以上的不同尺寸目標,空氣中不(bú)同尺寸液滴陣列的捕獲。
可XYZ三維方向精確控製捕獲激光和拉曼激發激光焦點之間的相對位置,測試不同位置(zhì)的拉曼信號
非接觸、作用力均勻,不會造成對象機械損傷和汙染。
可以捕獲(huò)操(cāo)縱常見樣品及(jí)納米(mǐ)顆粒、不規則顆粒及氣相(xiàng)中的液滴進行3D捕獲。
係(xì)統穩定度更高,測量(liàng)結果受環境幹擾更小
操控更加靈活,光阱移動精度更高
避(bì)免視場不同位置光阱剛度的差異
可以進行(háng)多目標力學測量
典型參數
|
拉曼光(guāng)譜
|
激光波長
|
532nm(>60mW),785nm(>50mW)
|
|
拉曼頻移範圍
|
80-9000cm-1@532nm,80-3200cm-1@785nm
|
|
光譜分辨率
|
<2cm-1
|
|
信噪比(bǐ)
|
>20:1
|
|
空間分辨率
|
橫(héng)向(xiàng)分(fèn)辨率:<500nm@532nm 激光 縱向分辨率:<2um@50um 針孔,532nm 激光(guāng); <1um@10um 針孔,532nm 激光
|
|
光譜儀
|
320 mm 焦長,Czerny-Turner 式 1800g/mm@500nm Blazed 600g/mm@500nm Blazed 150g/mm@500nm Blazed
|
|
光譜 CCD 探測器
|
≥2000*256 像素,背照(zhào)式深耗盡芯片,QE>90%,可見近紅外(wài)專用
|
|
科研級倒置顯微鏡(jìng)
|
照明立(lì)柱與明場照明(míng)模塊 ; 雙層光路 ;
|
|
光鑷
|
定位分辨率
|
<0.01nm
|
|
激光器功率(lǜ)
|
1064 nm, 5w laser, class 4
|
|
控製目標個數
|
精確控製 200 個目標
|
|
捕獲範圍
|
大小 50nm~30μm,取決於被捕獲目(mù)標性質)
|
|
光阱切換(huàn)速率為
|
100KHz
|
|
時間漂移
|
4nm/min
|
|
多目標的光阱間漂移
|
優於 0.05nm/min
|
|
AOD 響應漂移
|
<1%
|
|
AOD 線性漂移
|
<1%
|
|
鬼影相對強度
|
從 25%下降到 0.1%
|
|
高速 CMOS
|
1000 幀(zhēn)/秒@128X128 分辨率);力學測量的分辨率可(kě)達約 100fN,精確度約 1pN
|
|
軟件
|
專用的拉曼光譜檢(jiǎn)測與分析(xī)軟件
|
測試案例(lì)
光鑷數據:
拉曼數據:
拉曼-光鑷聯用數據:
測試顆(kē)粒:濃度為0.5M到(dào)2M的NaCl水溶液發生的氣溶膠顆粒
穩(wěn)定的環境條件下(xià),在2分鍾內的連續25次(cì)測量中,液滴半(bàn)徑為4359.73±0.55nm,分辨率優於1nm;折射率為1.3757±0.0002,波動約0.015%








 13810146393
13810146393 在線(xiàn)谘詢
在線(xiàn)谘詢






